Солнечный трекер своими руками. Устройство слежения за Солнцем по двум осям (Solar Tracking System) Датчик слежения за солнцем
Солнечные панели вырабатывают оптимальный коэффициент полезного действия только тогда, когда их расположение находится в перпендикулярной плоскости по отношению к источнику энергии (солнечным лучам). Чтобы улучшить работоспособность альтернативных источников электроэнергии, инструкторы создают множество разных приспособлений. Одно из них - солнечный трекер. Предназначение этого механизма - слежение за движением солнца по небу и перемещение поверхности фотоэлектрического модуля в то положение, в котором есть возможность поглощать как можно больше ультрафиолетового излучения.
Установка трекера дает следующие преимущества:
- рост коэффициента полезного действия на 40-45%;
- увеличение производимой электроэнергии;
- экономия финансовых средств.
КПД увеличивается тогда, когда лучи солнца падают на рабочую поверхность под углом 90 0 . Эффективность сразу многократно возрастает. Поскольку производительность конкретной солнечной батареи становится больше, то нет нужды в установке дополнительных панелей. Следовательно, затраты на весь комплект солнечной электростанции снижаются, поскольку устанавливать дополнительные фотоэлектрические модули не требуется. Схема солнечного трекера:
Как уже было сказано выше, солнечный трекер выполняет 2 функции - отслеживание местоположения Солнца и поворот рабочей поверхности в нужном направлении. За установление параметров траектории движения светила и выявление точки максимальной концентрации солнечных лучей отвечает USB-приемник. Устройство принимает сигнал от спутника GPS-навигатора. В зависимости от того, какие данные получил приемник, дается команда на перемещение фотоэлектрического модуля. Система перемещения модулей оборудована серводвигателем. Его задача - изменение направления вращения вала. Благодаря этому панель перемещается по разным сторонам.
Типы трекеров
По конструкции трекеры системы ориентации солнечных батарей разделяются на 2 основных категории - с одной и с двумя осями вращения.
У устройств с одной осью вращения одна степень свободы. Ориентация - с севера на юг. Этот вид по расположению оси вращения делится на следующие виды:
- горизонтальная ось - находится в горизонтальном положении относительно земной поверхности;
- вертикальная ось - расположена вертикально относительно земной поверхности;
- наклонная ось - находится в промежутке между вертикальной и горизонтальной траекторией;
- полярно ориентированная ось - ее местоположение зависит от того, где находится полярная звезда.
У двухосевого солнечного трекера отслеживания обе конструкции работают независимо друг от друга. Но они соединены в общую систему, которая обеспечивает движение трекера. Количество степеней свободы - две.
Отдельный подвид трекеров с двумя осями вращения - это те, которые укомплектованы опорным элементом. Есть 2 варианта таких устройств. Первый - роль опоры выполняет опорный столб. В верхней части располагается площадка, на которой установлен поворотный механизм. Второй вариант - роль основы выполняет круглая платформа или кольцо. На такой плоскости получится расположить сразу несколько панелей.
Для работы понадобятся:
- Шесть длинных обработанных досок и 4 коротких.
- Два колеса от велосипеда.
- Железные детали для крепления малого размера с отверстиями по краям.
- Линейный привод на 12 вольт.
- Светодиодный датчик слежения.
- Гайки, болты, винты, кабель и провод.

Сначала нужно подготовить основу из дерева. Нужно отмерить длину и ширину досок, обработать их, сколотить 2 половины треугольником. Затем скрепить их поперечными досками. Затем нужно подобрать подходящие железные детали (как на картинке) и проделать в них 6 отверстий на одинаковых расстояниях. Затем крепления прикручиваются к доскам шурупами.

При помощи кабеля крепится линейный привод. Кабель скрепляется металлической скобой. Нужно использовать именно гибкий материал для скрепления, чтобы в будущем рабочая поверхность могла двигаться и поворачиваться в нужном направлении.

Затем сверху закрепляется светодиодный датчик. Чтобы защитить его от повреждений, нужно накрыть его прозрачным предметом (чтобы пропускать лучи солнца). Это может быть, к примеру, пустая банка.


Самодельный трекер для солнечных батарей готов. Самостоятельно можно смастерить и , и даже
Имеют в том случае, если они перпендикулярно расположены по отношению к лучам Солнца, падающим на них. Когда в конструкции присутствует солнечный трекер, его поворотный механизм позволяет батареям поворачиваться вслед за светилом, не теряя при этом уровня работоспособности.
Солнечный трекер обеспечивает регулярное слежение за Солнцем, позволяющее панелям «ловить» его лучи и вбирать в себя максимальное количество света.
Преимущества устройства и принцип его работы
Безусловно, главное преимущество - повышение КПД гелиосистемы почти на 50% (в среднем, от 40 до 45%). Оптимальный угол падения солнечных лучей - 90°. Именно трекер и обеспечивает такой угол наклона, поворачивая батареи в нужном направлении. Установка такого устройства позволит не беспокоиться о необходимости монтажа дополнительных панелей. Это может быть сопряжено с нехваткой места и иными техническими сложностями.

Благодаря электронной системе, в которую входит специальный приемник с функцией GPS навигации, трекер точно может определить, где находится Солнце. Спутник системы GPS дает сигнал, который система «ловит», и, исходя из этого, контролирует движение батарей в ту или иную сторону. Главный действующий элемент в данном случае - так называемый серводвигатель. Он изменяет то направление, в котором движется вал. Что же касается принципа перемещения, он может быть разным. Исходя из него, конструкции трекеров разделяются на несколько видов.
Виды солнечных трекеров
На основании действия осей вращения, устройства бывают:
- с осью, вращающейся в горизонтальном направлении
- ось вращается вертикально относительно земной поверхности;
- происходит вращение оси «по наклонной» (средний вариант между первыми двумя);
- с осью, ориентированной на Полярную звезду ;
- двуосные трекеры, с большей амплитудой движения и широкими возможностями (обладают самой высокой степенью свободы).
Вопрос стоимости и целесообразность приобретения.
Такое устройство будет стоить очень дорого. Средняя стоимость любого подобного устройства начинается от 200 000 рублей и выше. Более того, его электромеханика довольно сложная и хрупкая. Под влиянием внешней среды с дорогостоящим прибором может случиться любой непредвиденный казус.
Поэтому любители электроники уже давно наловчились изготавливать солнечные трекеры самостоятельно. Это может показаться удивительным, но самодельные устройства чаще всего работают гораздо эффективнее и надежнее, а материальные вложения мастеру нужно будет сделать минимальные.
Безусловно, собранное своими руками устройство не будет таким «презентабельным» внешне, как покупное. Но простая двуосная конструкция, изготовленная самостоятельно, полностью окупит время и усилия. Важно и то, что если она по тем или иным причинам выйдет из строя, домашний мастер будет вполне в состоянии починить.
Основные элементы конструкции и их назначение
Для начала следует определиться, какие основные элементы гелиосистемы нам понадобятся:
- две солнечные панели;
- два сервопривода (или движка);
Прежде всего, понадобятся две простые солнечные панели мощностью от 3 до 5 Вт каждая. На выходе у нее имеется напряжение 6 вольт, что при последовательном соединении двух батарей дает 12 вольт с небольшим. На обратной стороне панели имеется USB-гнездо, а также «пятачки», благодаря которым можно делать пайку.
Из трех сегментов батареи, соответственно, имеется три выхода. Каждый сегмент (выход) генерирует по 2 вольта. Иными словами, при подключении, в зависимости от надобности, можно получить на выходе 2,4 либо 6 вольт.

Следующий необходимый узел - это сервопривод, точнее, два. Один будет поворачивать солнечную батарею по горизонтальной оси, а другой - по вертикальной. Благодаря таким простым движкам можно получить настоящий электропривод гелиоустановки.
Эти движки - непростые, так просто они вращаться не станут. Их необходимо немного доработать. В наборе с каждым приводом идут пластиковые диски, крестовины и винты для их крепления. Для крепления двигателей можно приобрести металлические кронштейны - чтобы закрепить их между собой в единую конструкцию. В наборе с кронштейнами также идут несколько необходимых элементов - в частности, крепежные винты, подшипник и диски.
И последний элемент - контроллер заряда, который будет принимать энергию от солнечных батарей и передавать ее в аккумулятор.

Начинаем работу с электронной начинки. Схема проста и легка для повторения. В ней можно поменять все, что угодно, на свое усмотрение, перебрав в Интернете несколько вариантов и предварительно собрав их воедино. Можно, например, поменять номиналы переменных и постоянных резисторов, спроектировать схему печатной платы на свое усмотрение - и получится работающий и долговечный электропривод гелиоустановки.
Изготовление схемы методом ЛУТ
Для начала схему платы нужно распечатать на специальной бумаге для ЛУТа (лазерно-утюжная технология). Бумага с наружной стороны глянцевая, с внутренней - обычная, матовая. Печатать придется на лазерном принтере, на глянцевой стороне. После контакта с утюгом плате нужно дать остыть, а потом отсоединить ее от матовой основы. Делается это легко, смывать ничего не потребуется.
Далее плата аккуратно переносится с бумаги на текстолит, который предварительно обезжиривается. Лучше всего сделать это мелкой наждачкой. Отрываем маленький кусочек и просто зашкуриваем. Далее прикладываем рисунок к плате и утюжим пару минут. Аккуратно снимаем приклеившуюся к текстолиту глянцевую основу. Если все было сделано аккуратно, схема благополучно будет перенесена на текстолит.

Обычно все переносится аккуратно, вплоть до мелкого текста. После этого главное - чтобы вытравились мелкие детали. При наличии на схеме небольших помарок они исправляются обычным маркером.
Далее плату необходимо вытравить. В качестве раствора для травления применяется персульфат аммония, его можно приобрести в радиотоварах. Один и тот же раствор можно использовать несколько раз. Перед использованием жидкость подогреть до 40-50°С, это значительно ускорит процесс травления. Травить следует минут 20, в специально подобранной пластиковой емкости. По истечении 20 минут нужно снять тонер - с помощью той же мелкой наждачной бумаги либо ацетона.
После этого в схеме аккуратно просверливаются все обозначенные отверстия, и можно приступать к постепенному спаиванию всей конструкции.
«Начинка» электросхемы и сборка
Для сборки понадобятся:
- «сердце» устройства - электронный усилитель LM 324 N;
- панель под усилитель;
- два транзистора типа 40 2С;
- два транзистора типа 40 1С;
- один керамический конденсатор номер 104;
- диоды (можно использовать любые, главное - чтобы они были не менее 3 ампер каждый; их понадобится 4 штуки);
- один резистор на 15 кОм;
- один резистор на 47 кОм;
- два фоторезистора;
- два подстроечных резистора - один на 100 кОм и другой на 10 кОм (резистор на 10 кОм отвечает за чувствительность фотодатчика).
После этого проводится спаивание схемы. При спаивании очень пригодится стандартный набор, состоящий из пластиковых гнезд и штекеров. Он прекрасно подходит для того, чтобы максимально качественно изготавливать любые самодельные схемы. На схеме, как правило, остается несколько перемычек. При всем старании сделать полностью печатную плату, без них все равно обойтись не получится.
В процессе отладки схемы обязательно понадобится такой элемент как концевой выключатель. Обычно их нужно два - чтобы своевременно прекращать вращение концевых двигателей, в том случае, если они начнут бесконтрольное вращение в процессе испытания. После того как устройство будет благополучно испытано, концевые двигатели собираются окончательно.
После отладки схемы следует приступить к вскрытию двигателя. Для этого нужно последовательно открутить четыре винта. Открываем верхнюю крышку двигателя. Внутри находится блок, состоящий из нескольких шестеренок. Все они металлические, вероятнее всего - из латуни. На главной шестерне имеется шпенечек, ограничивающий вращение двигателя. Лучше его сразу выдернуть небольшими плоскогубцами, так как физический ограничитель здесь не потребуется. Вместо ограничителей мы будем использовать те самые концевые выключатели, которые будут эффективно контролировать электропривод гелиоустановки во время его движения.
Плата управления находится с обратной стороны сервопривода. Под ней мы обнаруживаем всю «начинку». Провода, которые идут на плату управления, нужно будет отпаять и припаять напрямую на движок сервопривода. Таким образом, он превратится в небольшой двигатель постоянного тока. Он будет вращаться в обе стороны, в зависимости от полярности.
Напряжение и питание платы составляет 9-15 вольт. При желании можно выставить и меньше - например, 6,5 вольт.
При испытании схемы может оказаться так, что новоиспеченный электропривод гелиоустановки сразу начинает греться - по причине чрезмерного потребления тока. Ошибка часто заключается в том, что провода припаивают, прикасаясь к плате. При перепайке провода не должны касаться платы. Также их нельзя оставлять слишком близко к ней.
Предварительное испытание трекера
Готовое самодельное устройство слежения за Солнцем нужно предварительно испытать. Перед подключением оба резистора выкручиваются «в ноль» (против часовой стрелки), на них подается питание в 6,5 вольт, и двигатель, изготовленный из сервопривода, начинает быстро вращаться. При испытании можно сразу надеть на него насадку в виде двухлопастного пропеллера, идущую в комплектации, чтобы отслеживать вращение. При этом фоторезисторы должны иметь одинаковое освещение своих поверхностей.
Вращением 100-килоомного резистора по часовой стрелке (аккуратно, с помощью небольшой отвертки) добиваемся остановки двигателя. Находим то положение, в котором он либо почти останавливается, либо останавливается совсем. Теперь с помощью 10-килоомного резистора следует уменьшить чувствительность механизма, добавив ему немного сопротивления.
В процессе испытания следует время от времени слегка прикрывать пальцем поверхность то одного, то другого фоторезистора. Если на один резистор попадает меньше света, двигатель вращается в одну сторону, если на другой - двигатель вращается в другую сторону. В процессе испытания можно использовать лампу, которая послужит своего рода заменителем Солнца. По мере отворачивания конструкции от лампы двигатель, благодаря фоторезисторам, очень чутко реагирует на недостаток света и поворачивается в ту сторону, где его больше.
Далее проверяется работа концевых выключателей. Таким образом, готово устройство, которое будет вращать солнечную панель по оси Х. Чтобы она вращалась и по оси У, следует изготовить конструкцию, следуя абсолютно такой же схеме. В целом, понадобится два трекера для полноценного функционирования устройства.
Прикрепление трекеров к солнечным панелям
Сборка начинается с кронштейнов: двигатели собираются воедино. Для сопряжения двух частей кронштейна вставляем болтик и собираем «держатель» для двигателя, как и любой другой.
Далее принимаемся непосредственно за батарею. Вскрываем «коробочку» с электронной начинкой внутри и видим простой вариант: «один диод и десять граммов термоклея». Далее берутся два провода: со знаком «плюс» на первой панели, со знаком «минус» - на второй. Полярность, при желании, меняется так, как удобно.
Более надежно панели можно скрепить металлическим каркасом. Все крепится друг к другу с помощью термоклея и герметика. Главное, чтобы конструкция не имела прорех, а между двумя панелями посередине осталось расстояние в несколько сантиметров. Через него будут «выглядывать» фоторезисторы, следящие за Солнцем.
Далее на каркас (там же, посередине, над щелью) прикрепляется металлическая пластина из фольгированного текстолита. Фольгированный текстолит удобен своей практичностью. В отличие от пластика, он не плавится при нагревании на Солнце. Также в нем есть возможность легко проделать «дорожки» для фоторезисторов. На пластинку из текстолита наносятся контуры «дорожек» для светодиодов, по тому же принципу, что и основная схема - с применением специальной бумаги, проглаживанием утюгом и травлением.
Итак, концевой выключатель на движках обеспечивает ограничение их движения на 180 ° как по оси Х, так и по оси У. А высокочувствительные светодиоды «следят» за направлением солнечного света. Далее самодельная система отслеживания помещается в небольшой короб из дерева, предохраняющий провода от воздействия погодных условий и прочих неблагоприятных факторов.
Трекер для солнечных панелей - дорогостоящее и хрупкое устройство. Однако при его изготовлении своими руками оказывается, что есть прекрасная возможность обойтись без серьезных финансовых затрат. Движки, усовершенствованные собственноручно (с помощью концевых выключателей), - вариант более экономичный и надежный, который позволит панелям исправно поворачиваться в сторону Солнца в любую погоду и в любое время года.
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.

Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.

Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR". Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR" будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Солнечный трекер представляет собой электронно-механическую систему, предназначенную для наведения солнечных панелей на Солнце. Система отслеживает положение Солнца на небосводе, и управляет сервоприводом, который поворачивает панели в соответствующем направлении. Применение подобного трекера позволяет получить максимальную производительность от солнечных батарей.
Большинство самодельных трекеров встречающихся в интернете собраны на Arduino, для определения положения Солнца используются фотодатчики. В зависимости от степени освещенности и взаимного расположения фотодатчиков, выполняется поворот в сторону наибольшего освещения. У такого способа имеются недостатки: неизвестно как поведет себя система в облачную погоду; низкая помехозащищенность в плане реагирования на лунный свет и яркие источники света, а также на отдельные облака.
Из-за наличия вышеперечисленных недостатков, я разработал свой вариант экономичного солнечного трекера на сервоприводах, обеспечивающего слежение за Солнцем по всей видимой области неба в любое время, независимо от географического местоположения.
Метод слежения за Солнцем
Положение Солнца на небе можно определить не только по освещенности фотодатчиков, но и по формулам небесной механики исходя из географических координат точки наблюдения и точного времени. Сейчас будет много определений и формул, относящихся к небесной механике, так что приготовьтесь напрячь извилины). Для наведения солнечных панелей нужно определить горизонтальные координаты Солнца, это высота и азимут. Центр данной системы координат совпадает с местонахождением наблюдателя, расчеты ведутся относительно плоскости математического горизонта.
Высота h – это угол между плоскостью мат. горизонта и направлением на светило, отсчитывается от 0⁰ до +90⁰ к зениту, и от 0⁰ до -90⁰ к надиру.
Азимут A – угол между полуденной линией (грубо говоря, направление на юг) и линией пересечения плоскости мат. горизонта с плоскостью вертикального круга светила. Отсчитывается от точки юга в сторону суточного вращения небесной сферы в пределах 0⁰…360⁰, или от 0⁰ до +180⁰ к западу и от 0⁰ до −180⁰ к востоку. Горизонтальные координаты светила постоянно изменяются, вследствие суточного вращения Земли.
Ниже приведены формулы для вычисления высоты и азимута светила:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ cost);
A = atan2 (cosδ ∙ sint , cosδ ∙ sinϕ ∙ cost – sinδ ∙ cosϕ),
где δ – склонение светила, t – часовой угол светила, ϕ – широта точки наблюдения (0⁰…+90⁰ для северного полушария, 0⁰…-90⁰ для южного, 0⁰ – экватор).
Расшифровка функции atan2(y, x):
Как видно для расчета горизонтальных координат, необходимо вычислить склонение и часовой угол светила. Эти координаты относятся к первой экваториальной системе координат, где основной плоскостью является плоскость небесного экватора.
Склонение δ – угол между плоскостью небесного экватора и направлением на светило, отсчитывается от 0⁰ до +90⁰ в сторону северного полюса, и от 0⁰ до -90⁰ в сторону южного полюса.
Часовой угол t – двухгранный угол между плоскостью небесного меридиана и кругом склонения светила. Отсчитывается в сторону суточного вращения небесной сферы, к западу от верхней точки небесного экватора, в пределах 0⁰…360⁰, или от 00:00 до 24:00 (в часовой мере). Также часовой угол может измеряться в пределах от 0⁰ до 180⁰ (от 00:00 до 12:00) к западу и от 0⁰ до −180⁰ (от 00:00 до -12:00) к востоку. Часовой угол равен 0 в момент верхней кульминации светила, для Солнца в истинный полдень (не всегда совпадает с моментом времени, когда часы показывают 12:00 по местному времени).
Склонение Солнца изменяется в течение года (неравномерно) от -23,43⁰ до +23, 43⁰, вследствие орбитального движения Земли вокруг Солнца, и не связано с суточным вращением Земли. Определить склонение Солнца для любого дня года, проще всего из таблицы средних значений склонения за 4-х летний цикл. Таблицу можно скачать в конце статьи.
Часовой угол светила изменяется в течение суток (вследствие суточного вращения Земли), его можно вычислить, зная истинное солнечное время:
t = Tс.ист – 12:00ч, (-12:00…+11:59),
где Tс.ист – истинное солнечное время (00:00…23:59ч).
Истинное солнечное время можно вычислить, зная местное время, часовой пояс и долготу точки наблюдения:
Tс.ист = Tс.ср + EOT, или Tс.ист = UTC + λ + EOT,
где Tс.ср – среднее солнечное время в некоторой точке на Земле (зависит от долготы точки), UTC – всемирное координированное время, λ – долгота точки наблюдения в часовых единицах, EOT – уравнение времени.
Всемирное координированное время можно вычислить из местного времени (Tм) и часового пояса (N): UTC = Tм – N. Долгота местоположения λ отсчитывается от 0⁰ до 180⁰ к востоку от нулевого меридиана (восточная долгота), и от 0⁰ до -180⁰ к западу (западная долгота). При подстановке в вышеприведенную формулу, долготу нужно перевести в часовые единицы (1⁰ = 4 мин).
Уравнение времени EOT показывает разницу между средним солнечным временем и истинным солнечным времени, так как суточное движение Солнца неравномерно, вследствие эллиптичности орбиты Земли, а также наклона земной оси к плоскости эклиптики:
EOT = 9,87 ∙ sin2B – 7,53 ∙ cosB – 1,5 ∙ sinB,
где B = (360⁰ (N-81))/365, N – порядковый номер дня в году.
Таким образом, в течение года значение уравнения времени изменяется от -14,3 мин до +16,4 мин.
Ниже представлен график изменения уравнения времени в течение года:
Мне предстояло загнать все эти расчеты в программу микроконтроллера, я не рискнул писать на ассемблере, поэтому стал изучать СИ, пришлось неделями возиться с формулами и расчетами, для получения правильного результата, попутно изучая СИ. В итоге мне удалось написать рабочую программу, при этом погрешность вычислений не превышает ±1⁰.
Описание схемы солнечного трекера
Солнечный трекер задумывался под небольшую солнечную батарею мощностью 2Вт и напряжением 6В, для заряда литий-ионного аккумулятора, но лучше использовать более мощную батарею не менее 4Вт. В качестве электроприводов я использовал сервоприводы MG996R (купить можно в Китае, ссылка приведена в конце статьи). Дополнительно приобрел специальные кронштейны для сборки альт-азимутальной установки (ссылка для заказа в конце статьи). Собранная конструкция позволяет ориентировать солнечную батарею по высоте и азимуту, сервопривод азимута при этом стоит неподвижно и вращает сервопривод высоты вместе с кронштейнами.
Ниже представлена схема солнечного трекера:![]()
Схема построена на микроконтроллере PIC16F876A, который обладает значительным объемом памяти, и содержит множество периферийных модулей. Вся конструкция питается от Li-ion аккумулятора, который соответственно заряжается от солнечной батареи через модуль, на основе микросхемы TP4056, это специализированный контроллер заряда Li-ion аккумуляторов (ссылка для заказа в конце статьи). Для определения текущего времени и даты, в схеме используется модуль (ссылка для заказа в конце статьи). Часы достаточно точные, уход времени составляет ±2 минуты в год, я уже писал подробную статью о них, желающие могут ознакомиться. Для отображения параметров используется цифровой индикатор на (ссылка для заказа в конце статьи).
Максимальное напряжение на Li-ion аккумуляторе не превышает 4,1В, что недостаточно для питания сервоприводов, поэтому в схему добавлен повышающий модуль на основе микросхемы MT3608 (ссылка для заказа в конце статьи). Минимальное входное напряжение модуля 2В, максимальный ток нагрузки 2А, на модуле имеется многооборотный переменный резистор для настройки выходного напряжения. Для экономии энергии, питание на сервоприводы подается не постоянно, а только для изменения положения вала. Питание коммутируется с помощью p-канального полевого транзистора VT1, модуль преобразователя также управляется от микроконтроллера.
На плате модуля не предусмотрен контакт для управления, поэтому необходимо дополнительно подпаять провод к 4-му выводу микросхемы MT3608, это вход вкл/выкл преобразователя. На плате этот вывод подключен к “+” питания, предварительно нужно обрезать дорожки подходящие к этому выводу (для этого придется выпаять микросхему), либо приподнять вывод над платой. На плате модуля установлен чип резистор делителя напряжения, увеличение сопротивления этого резистора также уменьшит потребление в спящем режиме, я заменил его на другой, с сопротивлением 9,1 кОм, изначально стоял на 2,2 кОм. После замены нужно выставить выходное напряжение примерно на 5-5,5В для питания сервоприводов, рисунок ниже:
Модуль часов также необходимо доработать, для снижения энергопотребления нужно выпаять микросхему памяти 24c32, светодиод “POWER”, а также резистор (200 Ом), через который внешнее напряжение питания подается на батарейку, зачем китайцы так сделали, остается непонятным, ведь батарейка не предназначена для заряда, см. рисунок ниже:
Светодиод HL1 установлен для индикации ошибки связи с часами DS3231 (по интерфейсу I2C), светодиод начинает мигать, если нет ответа от часов.
Сборка и настройка солнечного трекера
Сборку альт-азимутальной установки следует начинать, когда сервоприводы установлены в среднее положение, это происходит при первом включении устройства, на индикаторе при этом высвечивается надпись “Cent”. Сервопривод азимута желательно закрепить на пластине, которая будет служить основанием установки, либо на стойке, так чтобы выходной вал был направлен вертикально вверх. Далее необходимо прикрепить кронштейн сервопривода высоты, сначала нужно прикрутить к кронштейну втулку скольжения, затем переходную муфту. Кронштейн нужно выставить перпендикулярно длинной стороне сервопривода азимута, как показано на фото:
При сборке трудно достичь перпендикулярного положения, но это не обязательно, допустимы отклонения в пределах ±5-10 градусов. В дальнейшем программная корректировка устранит это отклонение.
После закрепления сервопривода высоты остается прикрутить несущий кронштейн, сначала примеряем переходную муфту на вал сервопривода, выбираем такое положение, чтобы несущий кронштейн после установки был направлен вертикально вверх. Опять же не обязательно выставлять точное положение, как я уже говорил ранее. Общий вид установки представлен на следующем фото: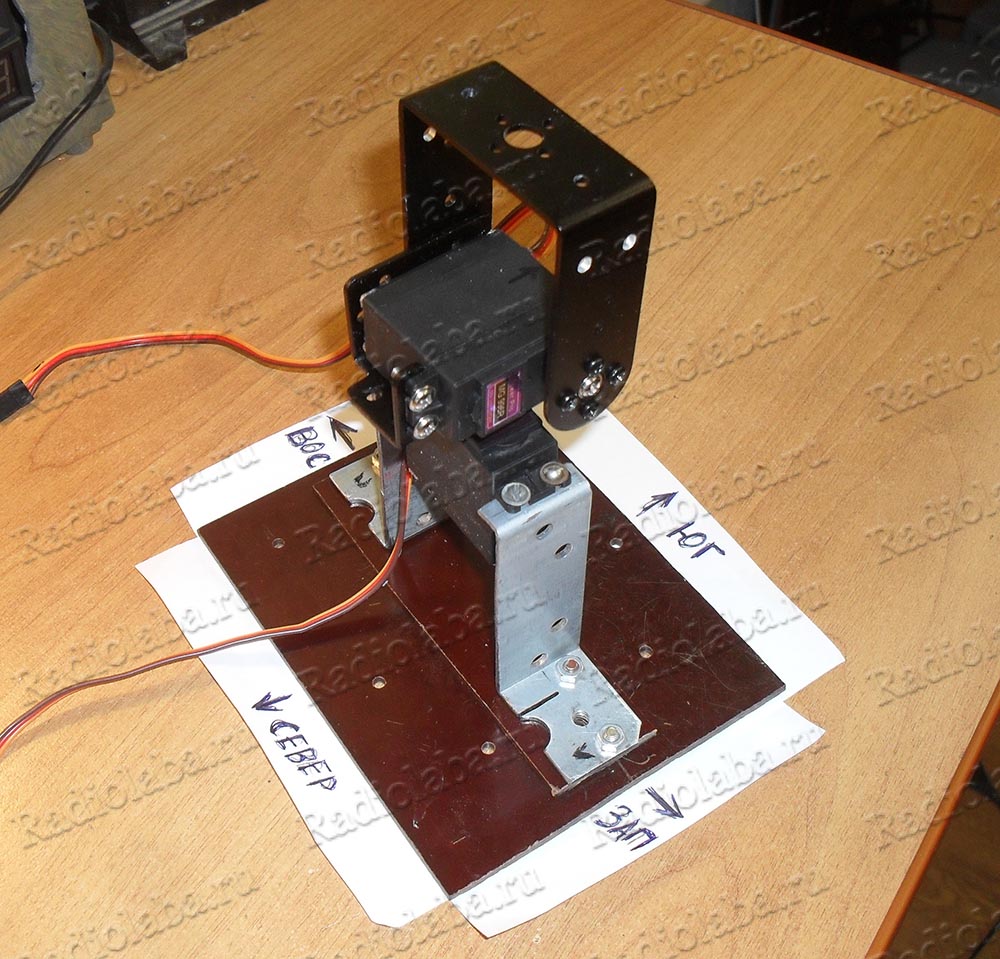
Далее следует процедура корректировки крайних положений сервоприводов. Настройку следует выполнять на ровной поверхности, когда вал сервопривода по азимуту, расположен вертикально (ось вращения направлена по отвесной линии). После нажатия кнопки “Ввод” несущий кронштейн поворачивается в сторону условного Севера и принимает горизонтальное положение (на индикаторе высвечивается надпись “north”):
Если имеется отклонение от горизонтали, то нужно подрегулировать положение кронштейна кнопками “Уст” и “Разряд”. Таким образом, происходит настройка крайнего положения сервопривода. Далее при нажатии кнопки “Ввод”, кронштейн поворачивается в сторону условного Юга (на индикаторе надпись South). При необходимости отрегулируйте горизонтальное положение кронштейна, как описано выше.
Дальнейшее нажатие кнопки “Ввод” приведет к повороту кронштейна в сторону условного Востока (на индикаторе надпись EASt). Кнопками “Уст” и “Разряд” корректируют направление, при этом удобно ориентироваться на корпус сервопривода азимута, нужно чтобы кронштейн был направлен по длинной стороне корпуса, если смотреть сверху:
При следующем нажатии кнопки “Ввод”, кронштейн повернется в сторону Запада (на индикаторе надпись WESt), корректировка выполняется вышеописанным способом.
В результате корректировки, поворот кронштейна по высоте и азимуту выполняется в пределах 180⁰, значения корректировок сохраняются в EEPROM памяти микроконтроллера. После нажатия кнопки “Ввод”, кронштейн примет скорректированное направление на условный Юг. Для правильной ориентации солнечной батареи, направление на условный Юг должно указывать на реальную точку Юга в данной местности, а вал сервопривода по азимуту расположен вертикально по отвесной линии.
После очередного нажатия кнопки “Ввод”, следует настройка времени, даты, часового пояса, координат местоположения, длительности спящего режима. Соответственно для каждого параметра на индикаторе высвечиваются следующие надписи:
– местное время, по умолчанию 0 ч. 0 мин;
– долгота местоположения, по умолчанию -0 град. 0 мин. (для западной долготы ставится знак минус “-”);
– широта местоположения, по умолчанию -0 град. 0 мин. (для южной широты ставится знак минус “-”);
– часовой пояс, по умолчанию -0, (для западной долготы ставится знак минус “-”);
– длительность спящего режима, по умолчанию 1 мин.
Кнопками “Разряд” и “Уст” выставляют значения параметров, при нажатии кнопки “Ввод”, значения времени, и даты записываются в , остальные параметры сохраняются в EEPROM памяти микроконтроллера. После ввода всех параметров, на индикаторе высвечивается надпись SUCCES (в течение 1 сек, затем индикатор гаснет), далее установка наводится на Солнце, согласно введенным параметрам.
Для экономии энергии, наведение на Солнце выполняется через определенный промежуток времени, который задается в параметре длительность спящего режима. После наведения сервоприводы обесточиваются, микроконтроллер переходит в спящий режим, общее потребление трекера снижается до 160 мкА. Длительность “сна” можно задать в пределах 1-255 мин.
При повторном включении трекера (после отключения питания), сначала проверяется EEPROM память, если сохраненные параметры корректны, трекер продолжает слежение за Солнцем, при этом цифровой индикатор остается в спящем режиме и не включается, для экономии энергии. Можно вообще отключить питание индикатора после первоначального ввода параметров. Для повторного входа в режим корректировок, нужно удерживать кнопку “Уст” и подать питание на трекер. Если параметры, считанные из EEPROM, неверные или отсутствуют, также произойдет переход в режим корректировок.
Я дополнительно добавил в программу микроконтроллера функцию вывода основных параметров по интерфейсу UART. После вычисления местоположения Солнца, микроконтроллер передает текущее значение времени, даты, порядковый номер дня, координаты местоположения, введенные при настройке, а также текущие значения высоты и азимута Солнца. Каждый параметр начинается с символа “$” и заканчивается символами “\r”, “\n”. Эти данные можно посмотреть на компьютере, подключив трекер через USB-UART переходник. В настройках терминальной программы нужно установить следующие настройки: cкорость передачи 9600 бит/сек, 8 бит данных, один стоповый бит. Ниже представлен скриншот с терминальной программы:![]()
Сервоприводы MG996R не защищены от попадания влаги внутрь корпуса, поэтому в случае наружного применения сервоприводы следует загерметизировать. Нужно отвернуть четыре болта с нижней стороны корпуса, и нанести нейтральный силиконовый герметик между стыками корпуса, также следует нанести герметик вокруг манжеты для ввода проводов в корпус. На шестерни редуктора можно дополнительно нанести смазку, так как заводская практически отсутствует. По отзывам, лучше всего подходит смазка ШРУС-4, в отличие от литола, она не замерзает на холоде. Для герметизации верхнего отверстия, на выходной вал можно надеть силиконовое кольцо, при этом нужно снять фаску с переходной муфты, которая устанавливается на вал, чтобы не создавать избыточного трения.
К несущему кронштейну я прикрепил прямоугольную текстолитовую пластину, на которую с помощью двухстороннего скотча приклеил солнечную батарею. Так как большую часть времени сервоприводы обесточены, то возможен поворот вала по высоте под действием тяжести солнечной батареи. Чтобы избежать этого, я прикрепил по бокам несущего кронштейна длинные противовесы, изготовленные из уголков и пластин. Изменяя массу противовесов, я сбалансировал конструкцию по оси вращения высоты.
Трекер выполняет наведение, когда Солнце находится над горизонтом, то есть когда его высота больше 0⁰. Когда Солнце заходит за горизонт (отрицательное значение высоты), трекер направляет солнечную батарею на Восток, дальнейшее слежение возобновляется с восходом Солнца. Слежение выполняется по всей видимой области неба.
Суточное движение Солнца и звезд, можно посмотреть на компьютере в программе Stellarium, это свободный виртуальный планетарий, который отображает реалистичное звездное небо. Программа отображает движение светил по небосводу, можно посмотреть положение Солнца и звезд на любой момент времени, также доступны данные о всевозможных координатах.
Я смонтировал устройство на печатной плате, которую разработал под размеры корпуса GAINTA G1202G. На плате имеется место под джампер (перемычку), с помощью которого можно отключать питание цифрового индикатора.
Полевой транзистор VT1 можно заменить на IRLML2244, IRLML6402. Также можно использовать транзисторы в корпусе SOIC-8 (придется переделать плату): IRF9332, IRF9310, IRF9317.
При отрицательных температурах Li-ion аккумуляторы теряют значительную емкость (происходит замерзание электролита), использовать аккумуляторы при температурах ниже +5 ⁰C не рекомендуется, так как это приводит к преждевременному сокращению ресурса. Поэтому если планируется эксплуатировать трекер в морозную погоду, то лучше использовать литий-железно-фосфатный аккумулятор LiFePO4. Аккмуляторы такого типа более морозостойкие, диапазон рабочих температур от -30 ⁰C до +55 ⁰C, максимальное напряжение 3,65В, минимальное 2В, среднее 3,3В, то есть ниже чем у Li-ion. Также к преимуществам можно отнести стабильное напряжение разряда, близкое к 3,2В. В конце статьи приведены ссылки для заказа аккумулятора, а также на модуль для заряда.
На основе солнечного трекера можно создать небольшую автономную систему, которая не требует внешнего питания, например удаленная метеостанция, или охранная система для дачи,и т.д. Можно заменить сервоприводы на более мощные, и установить солнечную панель побольше. Можно приспособить схему для солнечных панелей на 12, 18В, для заряда нескольких последовательно соединенных аккумуляторов, но для этого придется изменить схему, и использовать другие модули заряда.
Ниже представлены ссылки для заказа модулей и комплектующих для сборки солнечного трекера:
Солнечная батарея 6В 4,5Вт
Модуль часов реального времени DS3231
Цифровой индикатор на драйвере MAX7219
Модуль заряда Li-ion аккумулятора на TP4056
Аккумулятор LiFePO4 6500mah
Аккумулятор LiFePO4 1800mah
Модуль заряда LiFePO4 аккумулятора
Сервопривод MG996R
Кронштейны для сборки альт-азимутальной установки под сервоприводы MG996R
Повышающий преобразователь на MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Солнечные электростанции все увереннее входят в повседневную жизнь жителей различных уголков нашей страны и многих других государств.
Для того, чтобы повысить КПД использования солнечных панелей, конструкторы и инженеры, разрабатывают новые устройства и приспособления, одним из которых является солнечный трекер.
Что это такое и зачем он нужен
Солнечный трекер – это устройство, позволяющее следить за движением солнца по небосводу, и перемещать солнечную панель в положение, в котором поглощение солнечных лучей происходит наиболее эффективно.
Достоинства солнечного трекера
Достоинства установки трекера можно сформулировать следующим образом:
- КПД солнечных панелей возрастает на 40 -45%. Увеличение достигается за счет того, что наиболее эффективная работа панелей происходит, когда солнечные лучи падают под углом 90* на фотоэлементы панели;
- За счет установки трекера КПД солнечных панелей значительно повышается, количество вырабатываемой электрической энергии, увеличивается.
- В связи с увеличением производительности отдельно взятой панели, отпадает необходимость в установке дополнительных панелей, что в свою очередь, снижает стоимость всего комплекта солнечной электростанции.
Принцип работы
По своей сути, солнечный трекер, это комплексная система, следящая за местоположением солнца.
Для того, чтобы выполнить эту задачу, трекер должен выполнить следующие функции:
- Определить месторасположение солнца, относительно солнечной панели;
- Выполнить перемещение солнечной панели, в положение, в котором поглощение солнечных лучей будет максимальным.
За определение расположения Солнца отвечает электронная система, состоящая из GPS приемника, определяющего месторасположение солнца в месте установки солнечной электростанции, а также время текущих суток. В зависимости от полученного сигнала со спутника системы GPS-навигатора, электронная система дает ту, или иную команду на систему перемещения солнечных панелей.
В системе перемещения панелей устанавливается серводвигатель, позволяющий изменять направление вращения вала, что позволяет перемещать панель в разные стороны. Конструкция системы перемещения может быть различного типа, в зависимости с которой, солнечные трекера разделяются на два вида.

Виды трекеров
В зависимости от конструкции, трекера подразделяются на:
- С одной осью вращения – одноосные, устройства, обладающие одной степенью свободы. У данного вида трекеров степень свободы определяется осью вращения, которая ориентируется с севера на юг.
- С горизонтальной осью вращения – ось вращения находится в горизонтальной плоскости по отношению к поверхности земли;
- С вертикальной осью вращения – ось вращения расположена в вертикальной плоскости по отношению к поверхности земли;
- С наклонной осью вращения – ось вращения расположена в промежутке между вертикально и горизонтально расположенными осями, по отношению к поверхности земли;
- С полярно ориентированной осью вращения – ось устанавливается в соответствии с расположением полярной звезды. Для каждого конкретного случая, угол наклона, при данном расположении оси вращения, определяется индивидуально и зависит от широты месторасположения устройства.
- С двумя осями вращения – двуосные, устройства обладающий двумя степенями свободы. У данного вида трекеров, имеются две оси вращения, которые определяют степень свободы устройства. Оси вращения работают не зависимо друг от друга, но увязаны в общий комплекс устройств, приводящий трекер в движение, в соответствии с заданными параметрами.
- Трекер с двумя осями вращения и опорной плоскостью.

Данный вид подразделяется на:
- С двумя осями вращения на несущем столбе – несущие конструкции солнечных панелей монтируются на столбовой конструкции. В этом случае, в верхней части столба устраивается площадка, на которой монтируется поворотный механизм, при помощи которого осуществляется поворот несущих конструкций панелей в плоскости поверхности земли. Вторая степень свободы осуществляется как у одноосных трекеров.
- С двумя осями вращения и опорной плоскостью – несущие конструкции солнечных панелей монтируются на плоскости, которая в свою очередь крепится на круглой платформе или кольце, в виде направляющего рельса. Поворот осуществляется аналогично повороту на столбчатой конструкции, разница лишь в том, что на опорной плоскости можно смонтировать большее количество солнечных панелей, нежели на опорном столбе. Минус этой конструкции в том, что требуется большая площадь поверхности земли для монтажа подобного типа механизмов.
Средние цены
В зависимости от вида, комплектации, фирмы производителя и технических характеристик, стоимость трекеров может составлять:
ООО «Энергосистемы» г. Пенза, предлагает к реализации комплект трекера с двумя осями вращения и опорной плоскостью - стоимостью 1450000,00 рублей.
Технические характеристики данного комплекта:
- Осей вращения — 2 (горизонтальная и вертикальная);
- Рабочая поверхность – 96,0 м2;
- Максимальная рабочая поверхность – 108,0 м2;
- Электрическая мощность – 13,76 кВт;
- В составе комплекта предусмотрена метеостанция;
- Несущая рама — V-образная конструкция на опорно-поворотном устройстве;
- Вес, без солнечных панелей и основания — 3000 кг;
- Максимальный вес монтируемых солнечных панелей — 1300 кг;
- Системой автоматики предусмотрена защита солнечных панелей от тяжелых осадков (перевод панелей в вертикальное положение);
- Габариты — по высоте до 9,4 м, по вертикальной оси вращения — 12 м.

ООО «Экологичные технологии» (ООО «ЭкоТех») г. Ростов-на-Дону предлагает к реализации следующие модели трекеров:
Модель ED-8000 dual – стоимостью 667000,00 рублей.
Технические характеристики:
- Тип – с двумя осями вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 60 шт.;
- Мощность электрического привода (2 привода) – 100 Вт.
Модель ED-5000 dual 0 стоимостью 490000,00 рублей.
Технические характеристики:
- Тип – с двумя осями вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 42 шт.;
- Мощность электрического привода (2 привода) – 50 Вт.
Модель ED-3500 dual – стоимостью 397000,00 рублей.
Технические характеристики:
- Тип – с двумя осями вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 30 шт.;
- Мощность электрического привода (2 привода) – 30 Вт.

Модель ED-5000 – стоимостью 299000, рублей.
Технические характеристики:
- Тип – с одной осью вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 36 шт.;
Модель ED-2500 – стоимостью 235000,00 рублей.
Технические характеристики:
- Тип – с одной осью вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 18 шт.;
- Мощность электрического привода – 5,0 Вт.
Модель ED-1500 – стоимостью 175000,00 рублей.
Технические характеристики:
- Тип – с одной осью вращения;
- Количество монтируемых модулей (размером 1580х808 мм) – до 12 шт.;
- Мощность электрического привода – 5,0 Вт.
Из приведенных выше примеров видно, что при необходимости, можно выбрать необходимое устройство по виду, техническим характеристикам и стоимости.

Где купить
Как и прочие, сложные и дорогостоящие технические устройства, солнечные трекера лучше приобретать у представителей компаний производителей данного оборудования.
Также можно воспользоваться услугами в специализированных организациях, занимающихся продажей солнечных электростанций и комплектующих к ним. В таких организациях можно получить квалифицированную консультацию по выбору устройства и способу его монтажа.
Для того, чтобы избежать лишних трат времени и финансов, всегда необходимо ознакомиться с отзывами покупателей, уже воспользовавшихся услугами тех либо иных производителей и торгующих организаций.
Как сделать своими руками схема
Для того, чтобы собрать солнечный трекер своими руками, необходимо изготовить все составные элементы этого устройства:
- Основание (каркас) – несущая конструкция. которую можно изготовить из металлического профиля различных сечений.
- Устройство обеспечивающее поворот каркаса и осуществляющее контроль за процессом поворота.
- Защитные элементы. Детали, защищающие солнечные панели от непогоды.
- Система автоматического управления работой трекера.
- Устройство, обеспечивающее преобразование энергии (питание серводвигателей осуществляется от солнечных панелей).

Последовательность изготовления трекера своими руками:
- Несущую конструкцию (каркас), можно изготовить из металлического профиля различных сечений. Размер конструкции определяет количество монтируемых на ней солнечных панелей. Этот элемент, определяет вид трекера, т.е. количество подвижных осей и их расположение в пространстве.
Для изготовления металлоконструкций необходимо уметь работать с электрическим ручным инструментом и сварочными устройствами. - Для обеспечения поворота трекера в горизонтальной плоскости, используется серводвигатель, обеспечивающий вращения в разные стороны. Для управления серводвигателем необходимо собрать электронную схему управления, в основу работы которой, заложена работа фоторезисторов. При необходимости установки более сложной схемы, лучшим вариантом будет – приобрести готовое устройство.
- Для обеспечения поворота вокруг вертикальной оси можно воспользоваться часовым механизмом механических часов, припаяв электрические контакты к стрелке часов (подвижный контакт) и к часовым отметкам на циферблате (неподвижные контакты). Сделав такой 1 контакт (на 12 часах циферблата), двигатель будет включаться 1 раз в час. Сделав еще один неподвижный контакт на отметке в 6 часов, двигатель будет включаться через 30 минут. Работа (включение) двигателя привода включается в следующей последовательности: длинная стрелка поворачивается и проходит через двенадцать часов, контакты замыкаются, цепь управления двигателем привода замыкается, двигатель поворачивает панель.
Для поворота в горизонтальной оси, также можно использовать принцип водяных часов. В этом случае, солнечная панель устанавливается горизонтально (используется горизонтальная ось вращения), с одной стороны к панели прикрепляется утяжеление (любой предмет с постоянной массой), с другой стороны прикрепляется емкость с водой, того же веса, что и утяжеление с противоположной стороны. В емкости с водой делаются отверстия, вода вытекает, под действием утяжеления солнечная панель поворачивается. Количество отверстий и их диаметр, необходимо определить опытным путем. - Защитные элементы от дождя, града и прочих атмосферных явлений каждый выбирает индивидуально.
- Наличие системы автоматики определяется схемой управления, о которой писалось выше. Для создания безопасных условий работы установки, и способности работы в автоматическом режиме, можно приобрести блок управления трекером заводского производства.
- Устройство для преобразования энергии – инвертор. Данный электронный элемент лучше приобрести промышленного изготовления, хотя при наличии знаний в области электроники и умении работы с паяльником, изготовить своими руками тоже возможно.